靈感來自「蝠魟」!水上軟體機器人2.0 泳速更快且可在水下移動
編譯/曲姵蓉
北卡羅來納州立大學推出水上軟體機器人升級版,新版的軟體機器人更節能,每秒泳速可達6.8個身體長度,舊版機器人模型只能在水面上游泳,新機器人能夠在整個沒入水底下游泳。據了解,這款軟體機器人靈感來源於「蝠魟」,透過反覆運算,可以提升水下導航能力,機器人甚至可以在水面上拖曳有效載荷。專家表示,蝠魟軟體機器人是一個高度工程化的設計,但基本概念相當簡單。未來研究團隊將繼續改進機器人橫向移動能力,探索更多驅動模式,開發水下軟體機器人潛力。
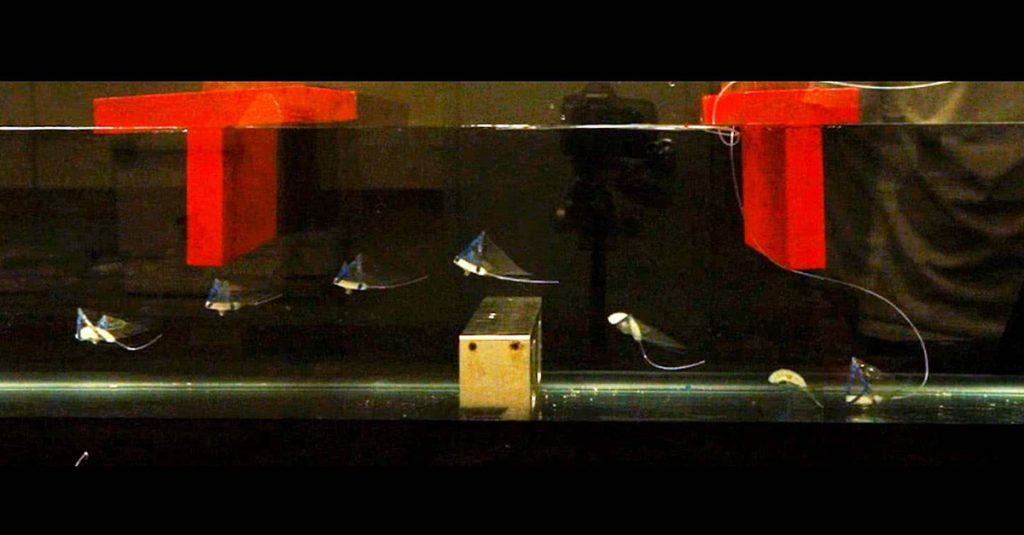
「蝠魟」軟體機器人2.0
根據報導,北卡羅來納州立大學以蝠魟為靈感,於2年前推出水上軟體機器人,每秒泳速為3.74個身體長度,但是只能在水面上游泳。此次北卡羅來納州立大學攜手維吉尼亞大學,開發出軟體機器人2.0版本,能整個沒入水下游泳。
更多新聞:美頂尖大學最新力作 「軟機器人」獲關注
流體動力學模仿鰭的動作
報導指出,這款軟體機器人的鰭形狀神似蝠魟,翅片連接到一個靈活的矽膠體上,可以泵送到充滿空氣的腔室。當氣室充氣時,鰭會跟著彎曲,很像蝠魟拍拍打鰭時向下衝的動作。當空氣從腔室中排出時,鰭片會自動彈回其原始位置,總體而言就是透過流體動力學原理,模仿鰭的動作,有效控制軟體機器人。
專家表示,蝠魟軟體機器人是一個高度工程化的設計,但基本概念相當簡單,只需要簡單按下幾個按鍵,機器人就可以在複雜的垂直環境中自動導航。未來研究團隊將精進機器人的橫向移動能力,並探索更多驅動模式,開發水下軟體機器人潛力。
資料來源:Eurek Alert
※探索職場,透視薪資行情,請參考【科技類-職缺百科】幫助你找到最適合的舞台!
瀏覽 2,862 次