中國開發新AI機器人!會學貓跳躍、著地 改變小行星探索方式
編譯/曲姵蓉
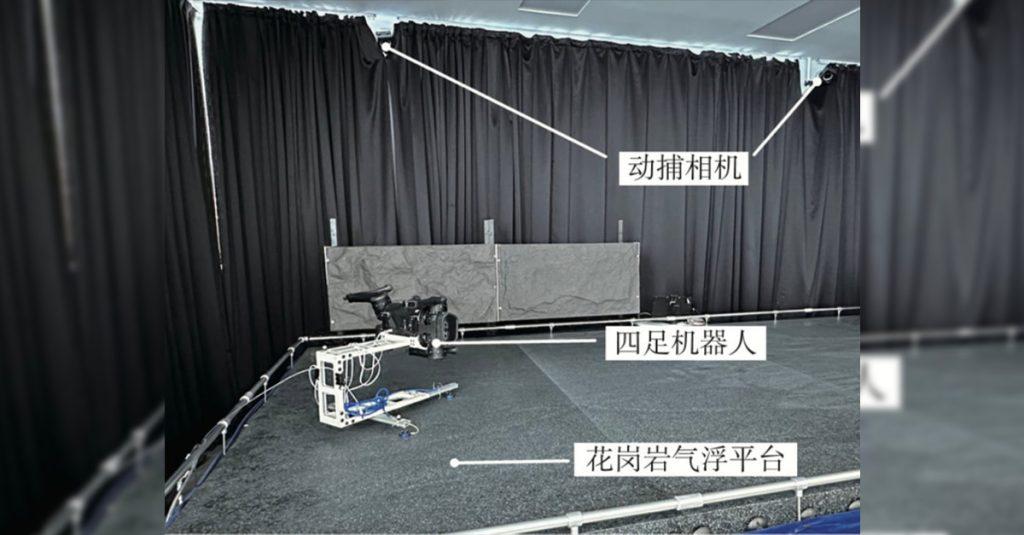
中國哈爾濱工業大學研究團隊開發全新人工智慧機器人,利用強化學習技術模仿貓咪跌倒時,扭動和用爪子著地的姿勢,讓機器人能在半空中調整姿勢。專家表示,此款機器人主要用於太空探索,能讓機器人跳過小行星崎嶇、低重力的表面,可能徹底探索小行星的方式。
「無模型」控制系統
根據報導,傳統機器人大多依賴沉重的專用穩定硬體系統,但是新款機器人使用「無模型」控制系統,協調四肢運動,讓機器人能更快地調整姿勢,甚至在空中扭轉前進方向。
更多新聞:淺談資料科學家的 4 種類型與在企業中所扮演的角色
機器人更輕鬆跳躍
專家表示,過去的太空機器人在小行星低重力環境中,容易面臨腿部力量不平衡,或者不受控制的旋轉,但這項研究成功解決了機器人在小行星上跳躍的技術限制。
研究團隊也強調,在小行星低重力環境中,機器人每次跳躍都會耗費不少時間等待自由落體,而新技術能讓機器人在這段時間內,快速修正跳躍後的高度偏差問題,確保機器人能安全著陸,隨時修改行進軌跡。
資料來源:SCMP
※探索職場,透視薪資行情,請參考【科技類-職缺百科】幫助你找到最適合的舞台!
瀏覽 3,348 次