麻省理工開發新演算法 讓機器人更快適應新環境
編譯/Elisa
美國麻省理工學院的電腦科學與人工智慧實驗室創新團隊,最近推出一套新的演算法「評估、推測和定位」(Estimate, Extrapolate, and Situate ,EES),要徹底改變機器人適應環境方式並提升適應能力,藉此讓他們自主學習。這套演算法有望提升機器人在工廠、家庭到醫院等各種環境效率。
新演算法助機器人適應新環境
這套EES演算法利用視覺系統來識別和監控機器人的環境,演算法評估機器人執行動作的可靠性,判斷是否值得繼續更多練習,接著視覺系統就會檢查動作正確度,最後預測機器人在整體任務上的表現。整套過程不需要人工干預,《俺算法就能協助機器人改進。
更多新聞:掃地機器人上太空 專吃地球軌道垃圾
提升機器人自主學習能力
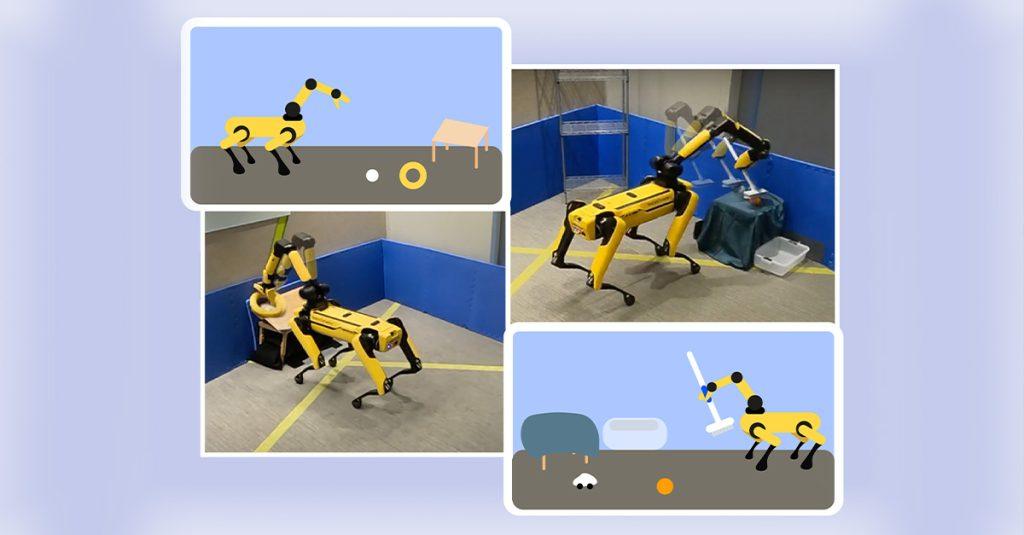
研究人員也對美國機器人公司Boston Dynamics開發的機器狗Spot進行試驗,其中一次是讓Spot在大約三小時內,學會如何將球和圓環安全放在傾斜的桌子上。另一項測試則是讓演算法引導機器人在大約兩小時內,將玩具掃進箱子裡。科學家也因此發現一些面臨到的限制,像是得使用離地面更低的桌子,好讓機器人更容易看到物體。有時機器人沒有偵測到某些東西,或是在錯誤的位置識別物體,都算失敗。開發團隊希望透過演算法讓機器人自己收集經驗,更好選擇效果更好的方法。
※探索職場,透視薪資行情,請參考【科技類-職缺百科】幫助你找到最適合的舞台!
瀏覽 549 次