原地起跳120公尺 跳躍機器人打破世界紀錄
編譯/曲姵蓉
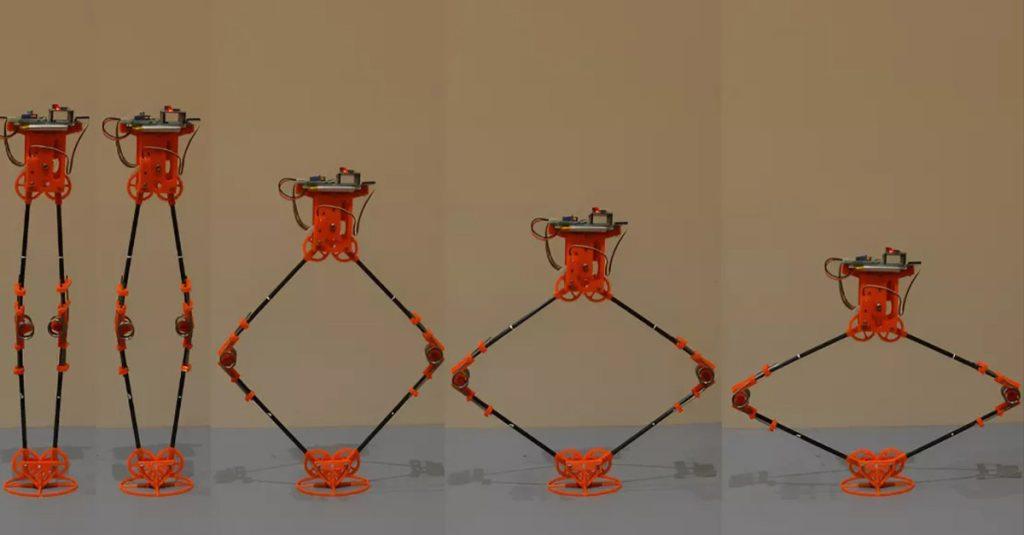
傳統的跳躍型機器人通常效率不高,沒辦法正確發力。但是曼徹斯特大學團隊結合數學、電腦模擬和實驗室測試,打造理想的機器人尺寸、形狀與零件,最終此款跳躍型機器人成功原地起跳超過120公尺,打破前一個33公尺的世界紀錄,未來有望部署於救援和太空探索行動中。
結合兩種跳躍方式
根據報導,傳統跳躍機器人通常效率不高,會在原地跳躍以外產生多餘動作,例如過早起跳、側向旋轉或往左右滑動偏移,導致原地起跳動能大幅減少。曼徹斯特大學研究團隊開發出兩種截然不同的跳躍機制,一種是直線棱柱形活塞式腿部運動,另一種是旋轉袋鼠踢式關節,並找出兩種活動形式之間的最佳平衡點,將大部分重量壓在機器人頂部保持跳躍穩定性,同時利用長直線延伸腿來防止跳躍動作提早結束。
更多新聞:勞動力短缺 成驅動人形機器人發展關鍵
跳得更高為挑戰
曼徹斯特大學空間機器人研究助理John Lo博士表示,雖然跳躍機器人早已存在,但在跳躍機器設計方面存有幾個重大挑戰,其中最主要的是如何跳得更高,研究團隊的新設計大大提高彈簧驅動的能源效率和性能。
累積著陸動能
該團隊的下一個目標是要讓機器人自主控制跳躍的方向,以及提高一次充電後可跳躍的次數,希望能利用跳躍後著陸產生的動能進行下一次跳躍,提高能源使用效率。專家也認為,此款跳躍機器人有望在未來協助救援和搜索行動,甚至可以部署在太空與行星探索中。
資料來源:TechSpot
瀏覽 1,942 次