再難到的地方都能爬!韓國研發秒速0.7公尺四足機器人
編譯/Elisa
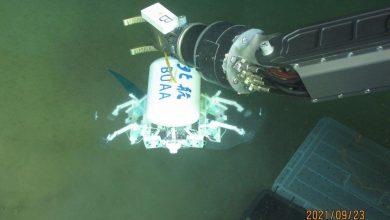
調查工業現場不是件容易的事,因為地點有可能在高海拔地區或密閉空間,例如在鋼筋大橋上或造船廠和街平台上,對工人來說風險巨大。不過現在韓國科學技術院開發一款有磁力腳的四足爬行機器人MARVEL,重達八公斤,可以在金屬地板、牆面和天花板快速移動。
抓住金屬表面和抵抗自然重力是研究團隊第一項挑戰,不過團隊利用電磁鐵以及磁性彈性體,讓機器人能夠改變每隻腳的磁性。另外研究人員也透過模擬貓在前進時,如何用前爪試探物體,對機器人進行編程,讓機器人能掃描表面縫隙和孔洞,並繞過或越過障礙物。

測試顯示,MARVEL能跨過10公分寬的縫隙,爬過5公分高的障礙物, 一路從地板爬到牆壁再到天花板也不成問題,最高能達每秒0.7公尺,最重能承載3公斤。研究團隊也讓MARVEL在一個滿布灰塵與油漆的工業用金屬儲存槽試爬,結果顯示MARVEL能以每秒0.35公尺爬上表面,還能避免撞到突起物並越過障礙物。團隊希望未來結合視覺感測器、運動規劃(motion planner)編程和軌跡最佳化(trajectory optimization),讓MARVEL能自主攀爬和執行各種任務。
瀏覽 2,590 次