NVIDIA Isaac Lab開源機器人學習框架 實現產業數位化和實體 AI 模擬
記者 / 孟圓琦
輝達(NVIDIA)在本周於德國慕尼黑登場的機器人學習大會(CoRL)上,發表了嶄新的人工智慧(AI)和模擬工具及工作流程,該項目的相關陣容連同NVIDIA Isaac Lab機器人學習框架的正式推出,以及六個專為 GR00T 專案設計的人形機器人學習工作流程,顯著加速開發人形機器人等AI驅動的機器人的工作,也包括用於影片處理的 NVIDIA Cosmos tokenizer和 NVIDIA NeMo Curator。
延伸閱讀:川普2.0 台積電輝達和馬斯克會怎樣
NVIDIA Isaac Lab 是一個基於 NVIDIA Omniverse的開源機器人學習框架,該平台用於開發 OpenUSD 應用,以實現產業數位化和實體 AI 模擬。開發者可以利用 Isaac Lab 來大規模訓練機器人策略。這個開源的統一機器人學習框架適用於任何形態的機器人——從人形機器人到四足機器人以及協作機器人——以應對日益複雜的動作和互動。
其中,開源的 Cosmos tokenizer(標記器)則是藉由將影像和影片分解為極高壓縮率的高品質標記,為機器人開發人員提供卓越的視覺標記功能。其運行速度比目前標記器快 12 倍,而 NeMo Curator 提供的影像處理管理速度比未優化的處理流程快 7 倍。
NeMo Curator 現在包括一個影片處理管道,使機器人開發者能夠提高其世界模型在處理大規模文本、圖像和影片數據時的準確性。透過自動管道編排簡化資料管理,從而大幅縮短處理時間,它支援跨多節點多 GPU 系統的線性擴展,有效處理超過 100 PB 的資料,不僅簡化了 AI 開發、降低了成本並加快了上市時間。
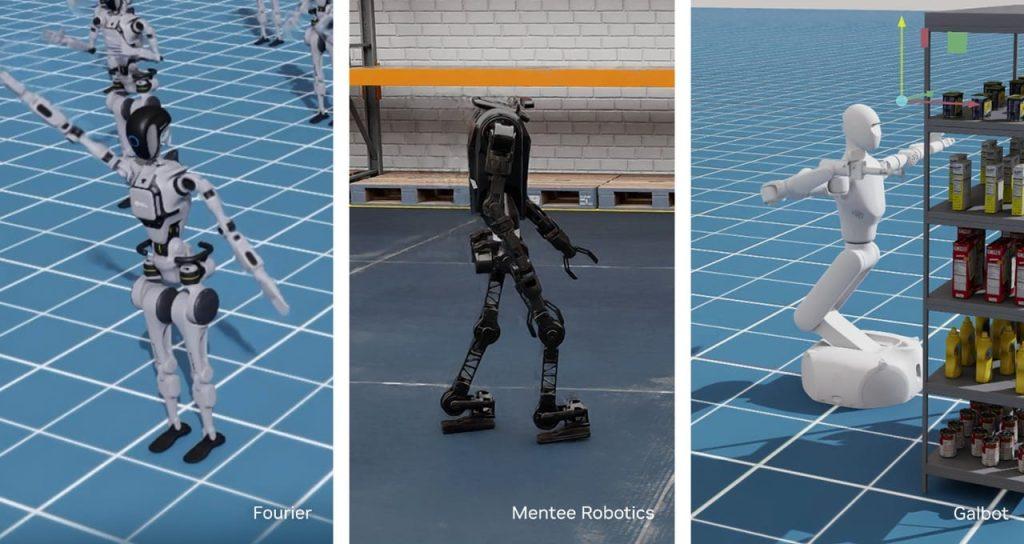
全球領先的商業機器人製造商、機器人應用開發者及機器人研究機構都在採用 Isaac Lab,其中包括 1X、Agility Robotics、The AI Institute、Berkeley Humanoid、波士頓動力(Boston Dynamics)、Field AI、Fourier、Galbot、Mentee Robotics、Skild AI、Swiss-Mile、Unitree Robotics 和小鵬機器人。
1X Technologies 的 AI 副總裁 Eric Jang 表示:「NVIDIA Cosmos 標記器在保持視覺真實度的同時,實現了資料高時間和空間的壓縮,這使我們能以更高的運算效率訓練具有長視野影片生成的模型。」
NVIDIA Isaac Lab 1.2 現已推出,並在 GitHub 上開源。 NVIDIA Cosmos 標記器現已在 GitHub 和 Hugging Face上提供。用於影片處理的 NeMo Curator 將於本月底推出。
※探索職場,透視薪資行情,請參考【科技類-職缺百科】幫助你找到最適合的舞台!
瀏覽 1,130 次