韓國為癱患者開發協助行走機器人 性能提升、穿戴方便
編譯/Elisa
韓國科學技術院(Korea Advanced Institute of Science and Technology, KAIST)從2015年就在為下半身癱瘓情況最嚴重的患者,設計可協助行走及復健的機器人,並分別在2016年和2020年推出兩款肌力輔助穿戴式裝置「WalkON Suit」系列。這兩款裝置可讓使用者行走速度提升到每小時3.2公里,與正常人相當,也能穿越狹窄通道、進門和走樓梯。

正面穿戴輔助設備無需他人協助
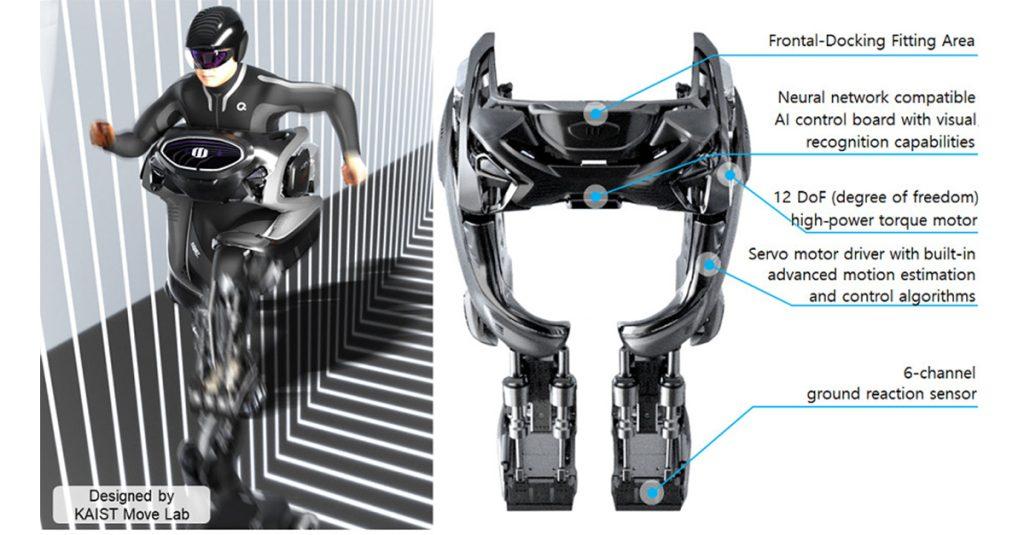
但就和其他穿戴式裝置一樣,這兩款輔助裝備都需要他人協助才能穿戴,因此韓國科學技術院近期推出新一款穿戴式機器人WalkON Suit F1,採用正面套上方式,使用者不用離開輪椅,也就是不需要他人協助就能穿戴。機器人還能像人型機器人一樣可以行走,並具有自主控制重心功能,受到推動也夠保持平衡,不會跌倒,代表使用者站立時能自由使用雙手,在沒有拐杖情況下走幾步。

更多新聞:穿戴式的AI助手!夏普開發AI Smart Link目標2025實現商業化
新輔助式機器人平衡更好更安全
另外WalkON Suit F1的馬達、減速器和馬達驅動器等關鍵零件都是國產,尤其是馬達驅動器的嵌入式軟體技術大幅改善,不用昂貴的高端控制器就能達成先進的運動控制演算法。同時還安裝能檢測障礙物的視覺識別系統和應用神經網路的人工智慧板,控制性能相比目前國外最佳技術還要高三倍。開發團隊也樂觀表示,新款穿戴式機器人技術有望成為未來穿戴式產業的標準之一。
※探索職場,透視薪資行情,請參考【科技類-職缺百科】幫助你找到最適合的舞台!
瀏覽 136 次